





- Home
- 研究内容

研究内容一覧
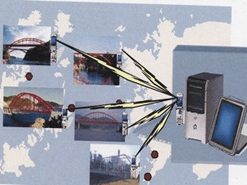
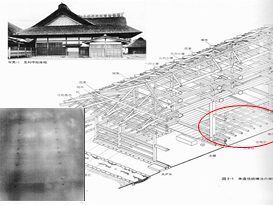
構造物ヘルスモニタリング



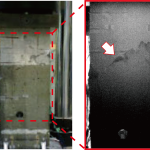
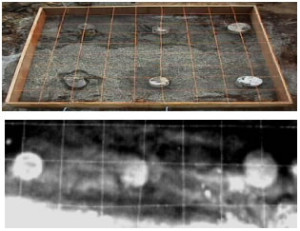
IRカメラと樹脂塗装を組み合わせた
インフラの欠陥検査および予防工技術
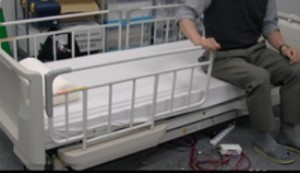
警報システム


高齢者見守りシステム


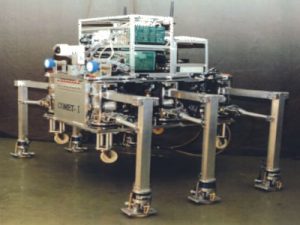
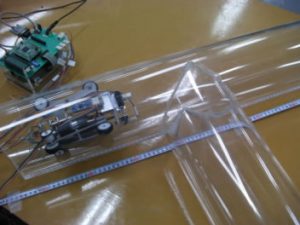
センサ特性計測ロボットの研究

災害救助用ロボット



人道的地雷探知・除去技術の研究

その他



〒015-0055 秋田県由利本荘市土谷字海老ノ口84-4
TEL:0184-27-2220 Copyright © Akita Prefectural University. All Rights Reserved.