






配管内自律移動検査ロボットの研究
都市部におけるガスや水道等の配管は大規模に地下に埋没されており,その内部を人が地上から直接観察,検査することは困難である.管内の傷や腐食は破損や漏れを引き起こし,爆発や漏えいによる大事故につながっていくと考えられる.特に近年,都市ガスを供給するガス配管の老朽化により,火災やガス中毒などによる死亡事故が頻発しており,点検作業の充実と対策が急がれている.
点検作業では配管の肉厚や減肉量の測定,漏れ,亀裂の有無について確認している.その際,超音波を用いた数値測定による検査や内視鏡を用いた目視検査,聴診棒と呼ばれる地中の音を聞くことができる器具を使い,埋没配管の位置を確認しながら地下の異常音を認識する検査などが実施されている.いずれの検査においても検査員の労力と時間,能力と経験への依存,大規模な工事の実施,経費増加などの要因から,予防や早期発見が困難な状況にある.事故を未然に防ぐためには,日頃の維持点検と事故の初期段階での適切な措置が重要であるが,検査対象の全てを短期間で行うことは非常に困難である.
本研究では,点検作業の効率化を図るとともに,検査体制や安全性の向上に貢献することを目的とした配管内検査ロボットの開発を実施した.ロボットを用いて検査を行うことにより,作業員の労力軽減や検査時間の短縮,信頼性の向上につながっていくと考えられる.
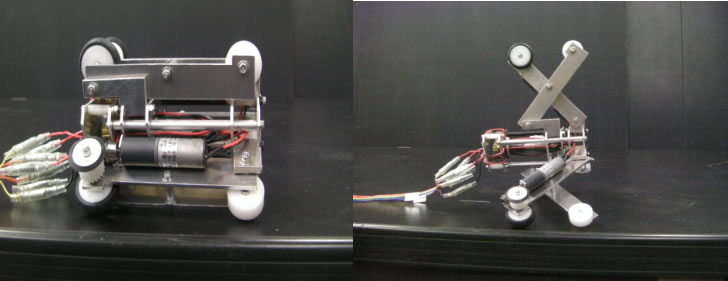
小型配管内検査ロボット(秋田県立大学)
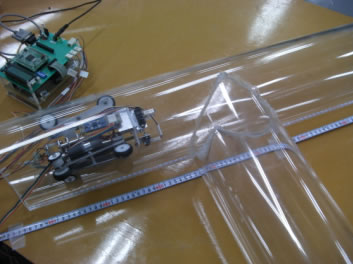
分岐路検出実験


〒015-0055 秋田県由利本荘市土谷字海老ノ口84-4
TEL:0184-27-2220 Copyright © Akita Prefectural University. All Rights Reserved.