






災害救助用ロボット
飛行ロボット災害救助システムの研究

災難救助において照明や可視光が遮られた閉鎖空間において災害現場でフライングロボットを3軸加速度センサにより方位測定と全方向型超音波センサによる飛行空間認識を実施しています.また,自己位置の確認のために3GHz帯携帯電話用電波を発信することにより地下道やトンネル内に設置された中継アンテナからの受信位置により飛行位置を判定する技術等について研究を行っています.
小型不整地移動ロボットの開発
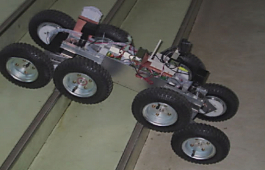
建物の崩壊や地下道等の閉鎖的空間に閉じ込められた人命を救助するために有人による発見や救助が困難な場所においてロボット技術による救助を可能にします.
雪崩遭難者捜索支援ロボットシステムに関する研究

雪崩による遭難者の捜索活動には二次災害の危険が伴うため,やむを得ず捜索を中止・延期しなければならない場合や,迂回し,遠回りしなければならない場合があります.本研究では遭難者の捜索活動を支援するための雪崩遭難者捜索支援ロボットの開発を目的としています.具体的には,雪崩ビーコンの電波を受信することによる,遭難者とロボットとの相対的な位置推定手法,GPS・方位センサを用いた雪崩現場におけるロボットの自己位置推定手法,複数のロボットを用いた効率的な捜索手法について検討しています.


〒015-0055 秋田県由利本荘市土谷字海老ノ口84-4
TEL:0184-27-2220 Copyright © Akita Prefectural University. All Rights Reserved.