 |
 |
|
|
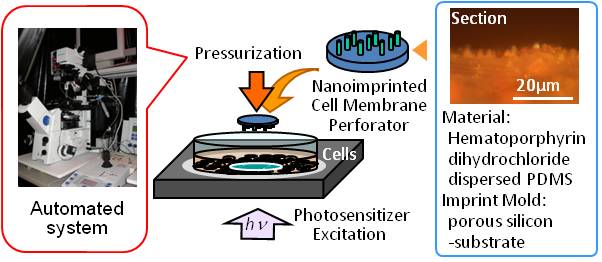
| Biotech: Cell processing robot for medical applications |
| The importance of developing methods in which certain materials can be
introduced into a group of cells has been gaining considerable attention.
Owing to safety concerns, the development of a high performance nonbiological
method has been expected for clinical application. We applied the oxidative
perforation to the microinjection method and found that the injection of
a functional dye, an antibody, and mRNA to the cells resulted in almost
100% survival. In the recent study, we extended the perforation process
in a large number of cells. A nanobrush- shaped soft-polymer sheets formed
by the nanoimprinting, which contained a clinically applicable photosensitizer,
are used as the cell membrane perforator. Moreover, we could automate the
process by the robotics technology for the high-throughput operation. |
 |
|
| Robotics: Living-body-mimicking Robotics |
| Our cell processing technology originally comes from the research on “Neural
interface”: a device that acts as an information mediator between the neuron
cells and artificial instruments. To evaluate neural interface for controlling
human prosthesis devices e.g. artificial limbs, we are preparing a proto-type
“artificial body” for the interface implanted rat. As a result of our first
trial, we could develop new linkage mechanisms and the robot which equipped
the mechanism could carry out the various walks including side stepping
with high speed, by swinging the legs. The prototype robot “Whitegoat”
is an eight-legged, radio-controlled walking robot. The possible applications
of our robot might not be limited to medicine, however. We also plan to
apply it to various other fields, considering its advantages in terms of
practicality, mass productivity and mobility.
|
 |
|
|