 |
 |
|
|
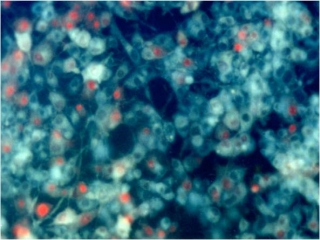
PC12細胞への
物質導入
(1999) |
高効率細胞膜穿孔法
|
光化学酸化反応に基づく、細胞死を誘発しにくい細胞膜穿孔法です。多数の細胞を対象にした物理化学的物質導入法として、細胞治療や再生医療に向けた基盤技術となります。
参考文献: “Self-organized ZnO nanorod with photooxidative cell membrane perforation
enables large-scale cell manipulation”, T.K. Saito et al., Analytical and
Bioanalytical Chemistry, 391(7), 2008, pp.2513-2519.
特許第4467793号,5053350号
|
|
初代
大規模細胞改変
ロボット
(2007) |
細胞改変ロボット
|
細胞膜穿孔法を自動化するロボットシステムを開発しています。ハードウェア、ソフトウェアとも研究室内でシステム化しており、様々な用途に対応可能です。
現在、基礎研究用に「セルスタンパーCP-01」が販売中、細胞治療に向けた大型機「セルスタンパーCP-02」がデモ中です。
参考文献:“Large-Scale High-Performance Cell Membrane Perforation, with Nanoimprinted Mass Producible Perforator”, T.K. Saito et al., 2009 IEEE/NIH Life Science Systems and Applications Workshop Proceedings, Bethesda, USA, 2009, pp.5-8. |
| セルスタンパー
CP-01 製品紹介(フナコシ) |

鳥獣対策仕様
しろやぎ(2018) |
多脚歩行ロボット"Whitegoat"系列機
|
神経インターフェース研究用の動物模擬ロボットとして開発された機体です。シンプルかつ力強い機体で、鳥獣被害対策ロボットとしても期待されています。
また、実践的な機体評価試験のため、かわさきロボット競技大会に機体名「しろやぎ」として参加中です。
参考文献:特許4554140号「多脚歩行ロボット」
|
|
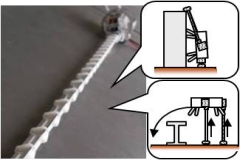
初代
マニピュレータ機構(2007) |
高伸縮比マニピュレータ機構
|
多脚歩行ロボットの移動・作業範囲の拡大のために開発されました。コンパクトな収納と伸長後の長さ、そして過負荷で屈曲しても元に戻るという3つの機能を併せ持っています。
参考文献:特許第5064739号、特許第5102647号「マニピュレータ機構」, US PAT 8490511, 9162362, EP PAT 2075100 "Manipulator Mechanism"
|
|
|
|