Home
研究内容
災害救助用ロボット
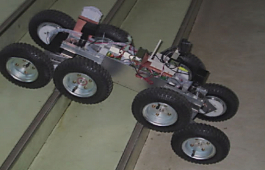
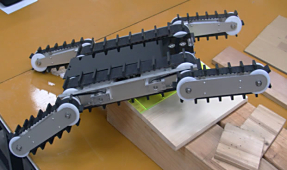
小型不整地移動ロボットの開発
小型不整地移動ロボットの開発
建物の崩壊や地下道等の閉鎖的空間に閉じ込められた人命を救助するために有人による発見や救助が困難な場所においてロボット技術による救助を可能にする.