





- Home
- 研究内容
- 人道的地雷探知・除去技術の研究
- 地雷探知ロボット技術

地雷ロボット技術
世界の紛争地域には,戦闘が終了した現在も未処理地雷が埋葬されたまま放置されている.これらの埋設地雷数は,平和時には国連等の援助により除去される.しかしまた対象国間で戦闘が始まれば,お互いに対人地雷等を埋設することにより,放置地雷の数を更終わりのない地獄を繰り返している.その結果非戦闘員である婦人や子供たちの犠牲者が22分に1人の割合で今も生まれている.これらの地雷敷設方式には,地中に仕掛けられる埋設式,航空等により広域の地表面にまかれる散布式と罠線を用いた仕掛け方式に分類される.このような問題を解決するために一手段として,開発中の人道的地雷探知ロボットCOMET-1を用いた遠隔からの地雷探知技術の使用を提案する.本ロボットのおける探知技術の特徴は,不整地における自律または半自律的による走行を実施して安全地帯における遠隔操作からの制御が可能なことである.また,ロボットに搭載されているIRカメラにより罠線及び埋設地雷の探知と金属探知器による埋設地雷等の遠隔探知を可能にしている.
さらに野外での使用を考慮して省エネ型の駆動回路を搭載し,走行および不整地の踏破機構についてはコンプライアンス制御による制動装置を用いている.歩行脚のすべてに力センサを装着して接地時の脚加荷重制御する.地雷埋設地帯での歩行安定性に寄与することができる。金属探知器の測定結果:ロボットが走行する際,軌道上の地表面およびその近傍に存在する金属地雷等を発見するための小型高性能のアルファス金属を用いた金属磁気探知器が歩行脚の全てに装着されていて危険地域に地雷埋設の有無を判定して確保している.
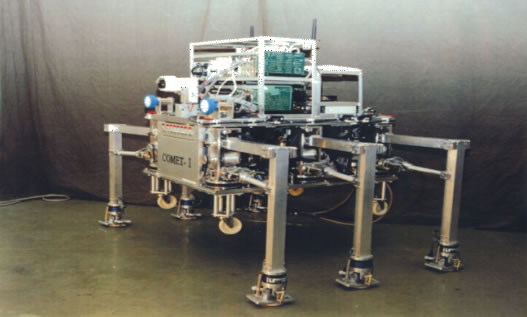
地雷探知ロボットCOMET


〒015-0055 秋田県由利本荘市土谷字海老ノ口84-4
TEL:0184-27-2220 Copyright © Akita Prefectural University. All Rights Reserved.