






GPSを用いた自律移動の補正技術に関する研究
近年,災害現場において人的被害を防ぐためにロボットの運用が求められている。東日本大震災では,レスキューロボットが災害現場に投入され様々な成果をあげている。しかし,遠隔操縦型のロボットでは電波や有線による通信が途絶えると操縦不能になる欠点から,使用範囲や条件が限られる.このような問題を解決するためには,ロボット自身が判断する能力を持ち自律して作業を行う必要があると考える.
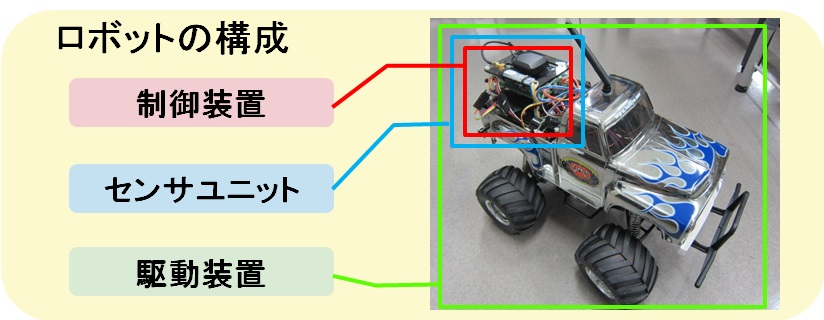
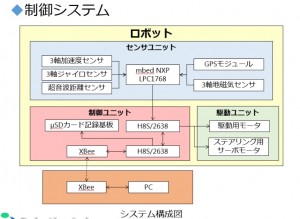
本研究では,屋外環境における自律移動ロボットの自律移動に関する制御手法の構築を目的とし,GPSを用いた自己位置推定の手法及び精度向上による自律移動の誤差修正について検討している.


〒015-0055 秋田県由利本荘市土谷字海老ノ口84-4
TEL:0184-27-2220 Copyright © Akita Prefectural University. All Rights Reserved.