






壁面検査ロボット
プロペラ推進移動機構
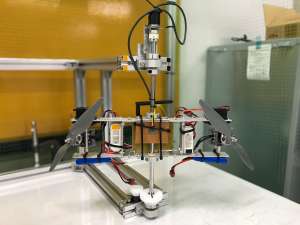
老朽化が進むインフラ点検の効率を高めるために,壁面移動ロボットの開発を進めています.そのロボットを駆動するためのプロペラ推進移動機構の研究を行っています.2つの可変ロータの目標合力の大きさと方向を制御することで,受動的に機構の姿勢も制御することが可能な移動機構です.
詳細:準備中
プロペラ推進壁面移動ロボット

橋梁やトンネルの壁面検査を目的としたロボットの開発を行っています.2つのロータで壁面にロボットを押し付け,4つの車輪を駆動して移動するロボットです.このロボットにはひび割れや内部空洞などの欠陥を検出するために赤外線放射温度計が搭載されており,検査する表面の温度を測定することが可能です.
詳細:準備中


〒015-0055 秋田県由利本荘市土谷字海老ノ口84-4
TEL:0184-27-2220 Copyright © Akita Prefectural University. All Rights Reserved.