Research
当研究室ではロボティクス、人工知能、数値解析といった技術をベースに、少子高齢化に対応可能な自動化技術の開発や、産業応用に繋がるテーマに取り組んでいます.
数値解析
数値シミュレーション技術はCAE(Computer Aided Engineering)の名の下に
ありとあらゆる分野で活用されおり、特に製品開発などにおいては必要不可欠となっています。
しかしながらまだ残されている課題はあります。
当研究室では解析における精度向上のほか、模擬することの難しい現象のモデル化などにチャレンジします。
人工知能
長らく続く第三次AIブームの中でAIは様々な現場で応用されるようになってきました。
しかしながら地方での農業分野などでの活用を進めるためには開発および運用の低コスト化が
必要となっています。
当研究室ではAIの活用推進に繋がる低コストなシステムを提案していきます。
ロボット

農業人口の減少に伴い、労働力不足が深刻化しており、持続的な社会実現のためにも農作業の自動化・省力化は必要不可欠になっています。
当研究室では小型の移動ロボットやアームロボットなどを遠隔操作または自律動作させることで、作業負担を軽減するシステムを提案していきます。
数値解析(Numerical Analysis)
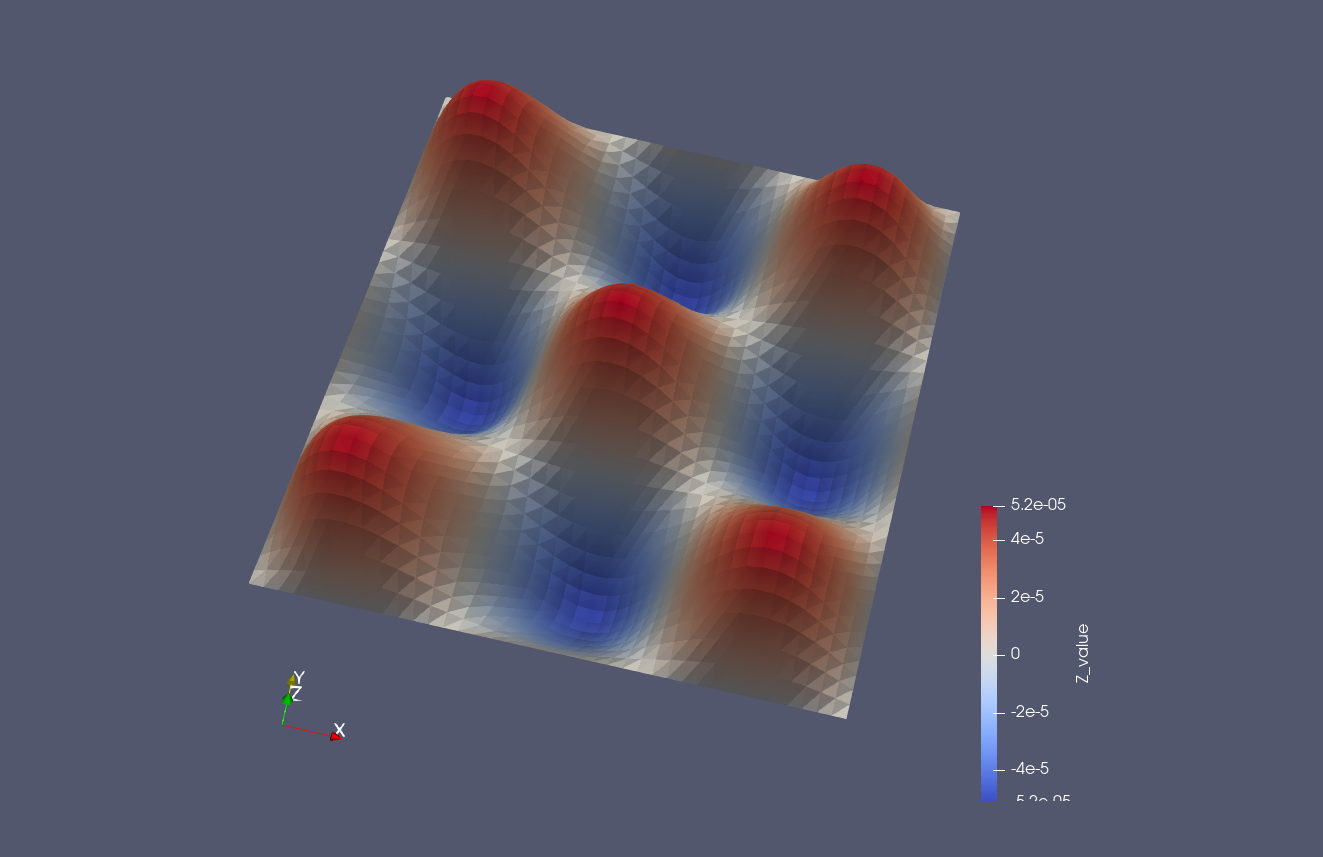
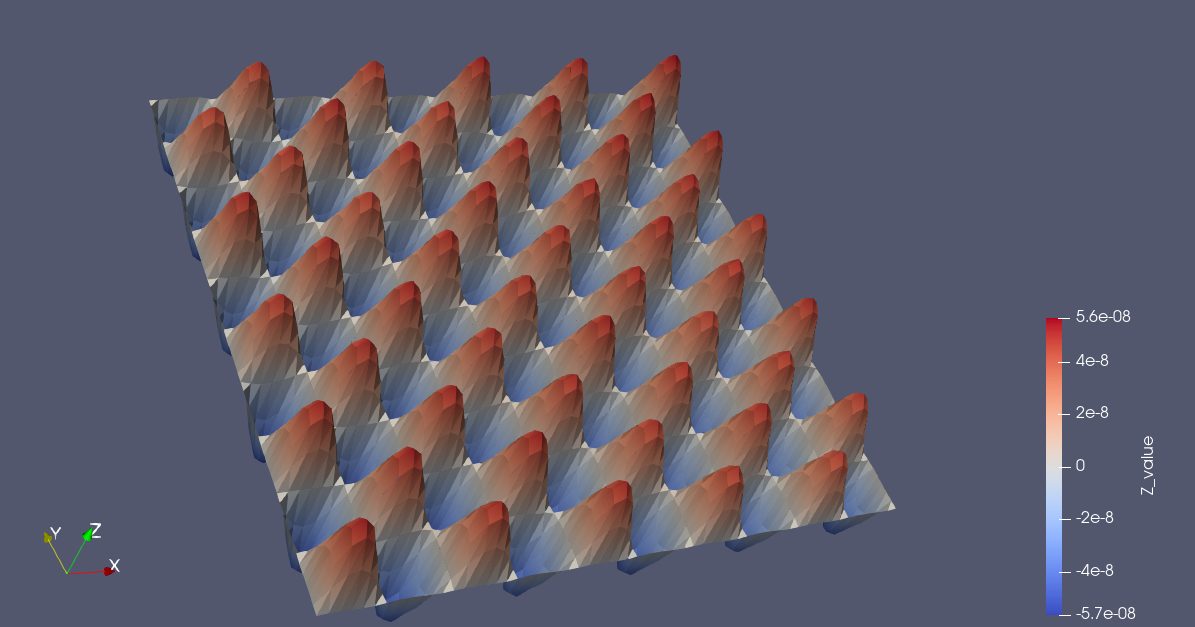
■ 高次モードの振動解析における研究
本研究ではより精度良く解析が行える可能性が見込める新しい手法「アイソレート要素法」を用いて固有値解析を行い、 有限要素法と比較してどのように優位性が見出せるか研究を行っています。
人工知能(Neural Network)
■ 木材伐採現場における木口径自動計測の実用化

木口の欠陥の検出にはセマンティックセグメンテーション(画像に対してピクセル単位で領域を分類することができる手法)を用い、 多数の木口の画像を学習させることで実現できます。また、木口径の計測には深度カメラを用いることで撮影距離によらず正確に計測することができます。
■ OpenPoseを用いた運動解析
その中でもOpenPoseは、画像や動画から、複数の人物の関節位置を同時に検出できるオープンソースのライブラリであり、 その高い精度と汎用性から広く利用されています。現在我々は、OpenPoseを用いて、スポーツの練習動画を解析し、解析結果から年齢や経験年数の違う人の 動きの違いを調べたり、より効率的な練習を目指したりするなど様々な場面に利用するために研究を行っています。
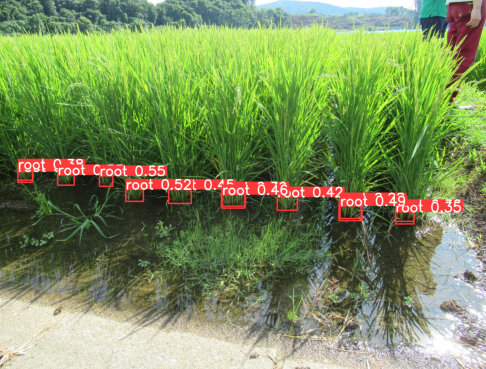
■ 自動生成された教師データを用いた画像認識の精度向上に関する研究


本研究では、稲やトマトの画像セグメンテーションを行うことを目的とした、仮想空間上での教師データの自動生成に関する研究を行っています。 仮想空間上の水田やトマト農園の中で教師データをプログラム的に生成することで、教師データ作成の手間を減らします。 また、仮想空間で生成された教師データを用いた人工知能は、現実世界の画像(写真)を用いたものより精度が劣る場合があるため、 画像生成AIなどを使った精度向上を検討しています。
ロボット(Robotics)
■ 農業ハウス内における作業負担軽減のための移動ロボットに関する研究

こちらの例では県内企業様のニーズに応じ、小型移動ロボットを遠隔操作し農業ハウス内の任意の場所のCO₂濃度を計測するシステムを構築しました。 作業者は移動ロボットに搭載されたカメラの映像を参考に遠隔操作を行います。またLTE回線を用いることで、インターネット環境が整っていない 農業ハウス場所からでも移動ロボットを遠隔操作できるように配慮しました。
将来的にはAIに自律操作を行わせることを考え、人間の操作データを自動的に蓄積し、これを学習データとしてAIの開発を進めていきます。