







- Home
- Research
- Development of the life support robot
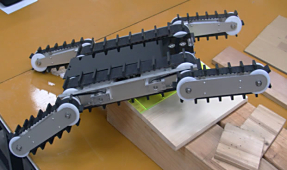
- A small robot that moves on rough terrain

Security and mine detection robot
It is a robot to save lives trapped in a closed space such as a collapsed building or an underpass.
Enables lifesaving in places where human detection and rescue are difficult.
This robot can move up and down steps, such as emergency stairs, autonomously. Normal driving is done by four wheels. The vehicle height can be raised to 750 mm.
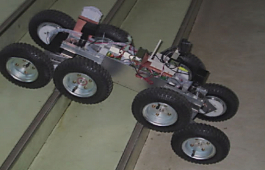
To conduct mine detection experiments using the eight-wheeled prototype robot RAT-1, we developed end effectors to be attached to the robot driving wheels. These wheels enable the robot to traverse the area safely and stably without hitting hidden mines. We created a simulation model for this study to assess the movement of a robot having metal sensors attached to the front of its wheels and to evaluate a driving algorithm with effect controls based on IR cameras. We verified the system efficiency in actual walking experiments. We also studied remote sensing technology uses for IR cameras combined with other metal sensors. Tests with trial mines were used to study the detection characteristics of IR cameras and various technologies for collecting and processing image data in real time for optimum mine detection.


84-4 Aza Ebinokuchi Tsuchiya Yurihonjo City 015-0055 Japan Copyright © Akita Prefectural University. All Rights Reserved.