








Autonomous movement correction technology using GPS
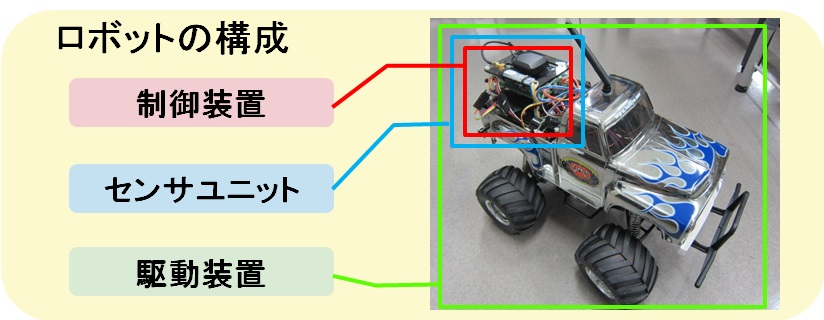
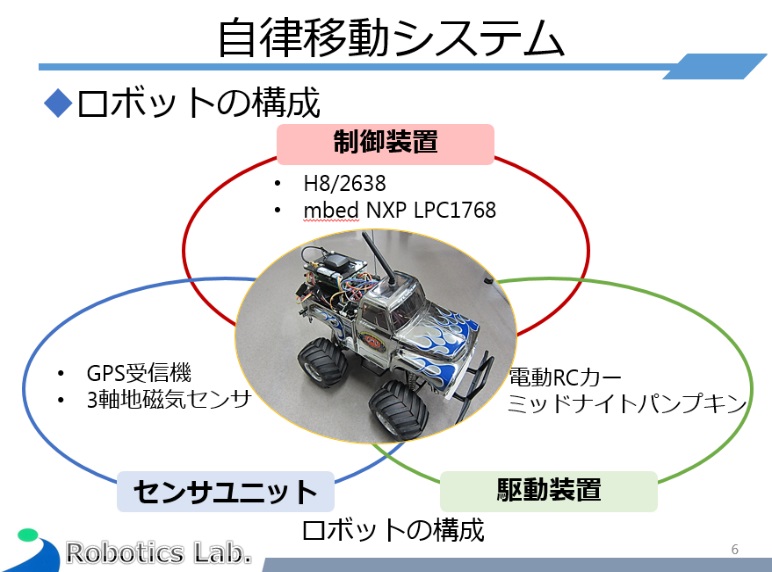
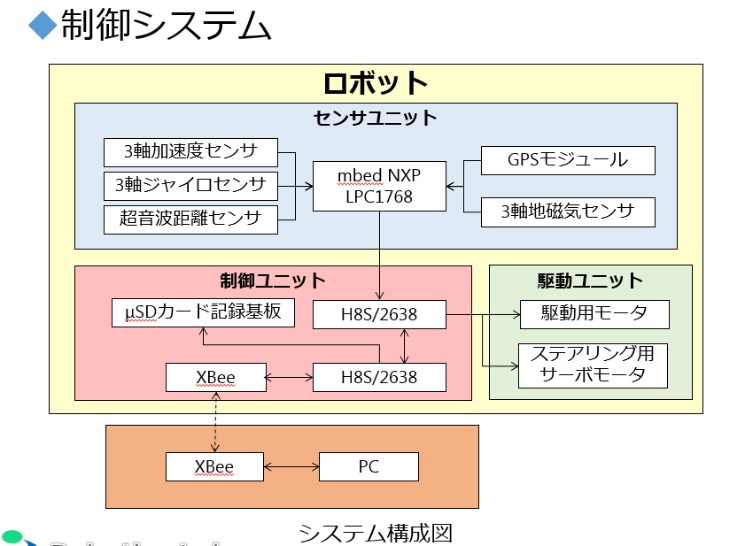
This is a control method for autonomous movement of autonomous mobile robots in an outdoor environment. Self-position estimation and error correction of autonomous movement are performed using GPS.


84-4 Aza Ebinokuchi Tsuchiya Yurihonjo City 015-0055 Japan Copyright © Akita Prefectural University. All Rights Reserved.