







- Home
- Research
- Landmine detection and removal technology
- Mine detecting robot

Mine detecting robot
A humanitarian landmine detection robot (COMET-1) with a metal sensor attached to the foot to ensure safe walking was developed in collaboration with Chiba University (1999). The robot can properly avoid land mines through compliance control. To conduct mine detection experiments using an eight-wheeled prototype, robot RAT-1, we developed end effectors to be attached to the robot’s driving wheels. The wheels enabled the robot to step safely and stably in the test area without hitting hidden mines. We created a simulation model for this study to test the movement of a robot having metal sensors attached to the front of its wheels and to test the driving algorithm with effect controls based on IR cameras. We verified the system efficiency in actual walking experiments. We also studied remote sensing technology uses for IR cameras combined with other metal sensors. Tests with trial mines were used to study the detection characteristics of IR cameras and various technologies for collecting and processing image data in real time for optimum mine detection.
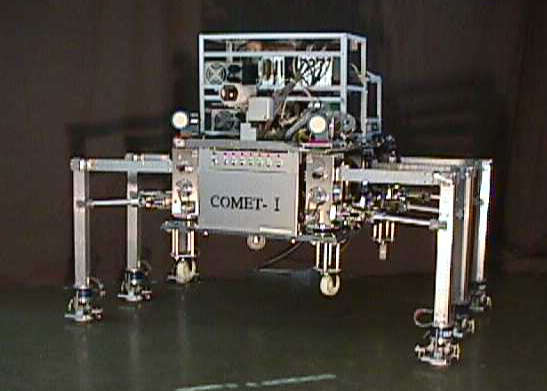
Mine detecting robot COMET-1

Legs of COMET-1

Mine demining


84-4 Aza Ebinokuchi Tsuchiya Yurihonjo City 015-0055 Japan Copyright © Akita Prefectural University. All Rights Reserved.