交通安全のための画像処理
目的
自動車運転における人間の行動は,認知,判断および操作の3つの要素によって成り立っている。
各種統計データから交通事故の発生には認知ミスが大きく影響していることがわかっており,
交通事故の予防には運転者や歩行者の認知を支援する技術が必要とされている。
一方で,運転者や歩行者の認知能力を向上させることも重要である。
画像処理等の先端技術を用いることでこれらの課題解決に取り組み,安全な道路交通の実現への寄与を目指す。
取組み
タッチパネル式運転者教育システム
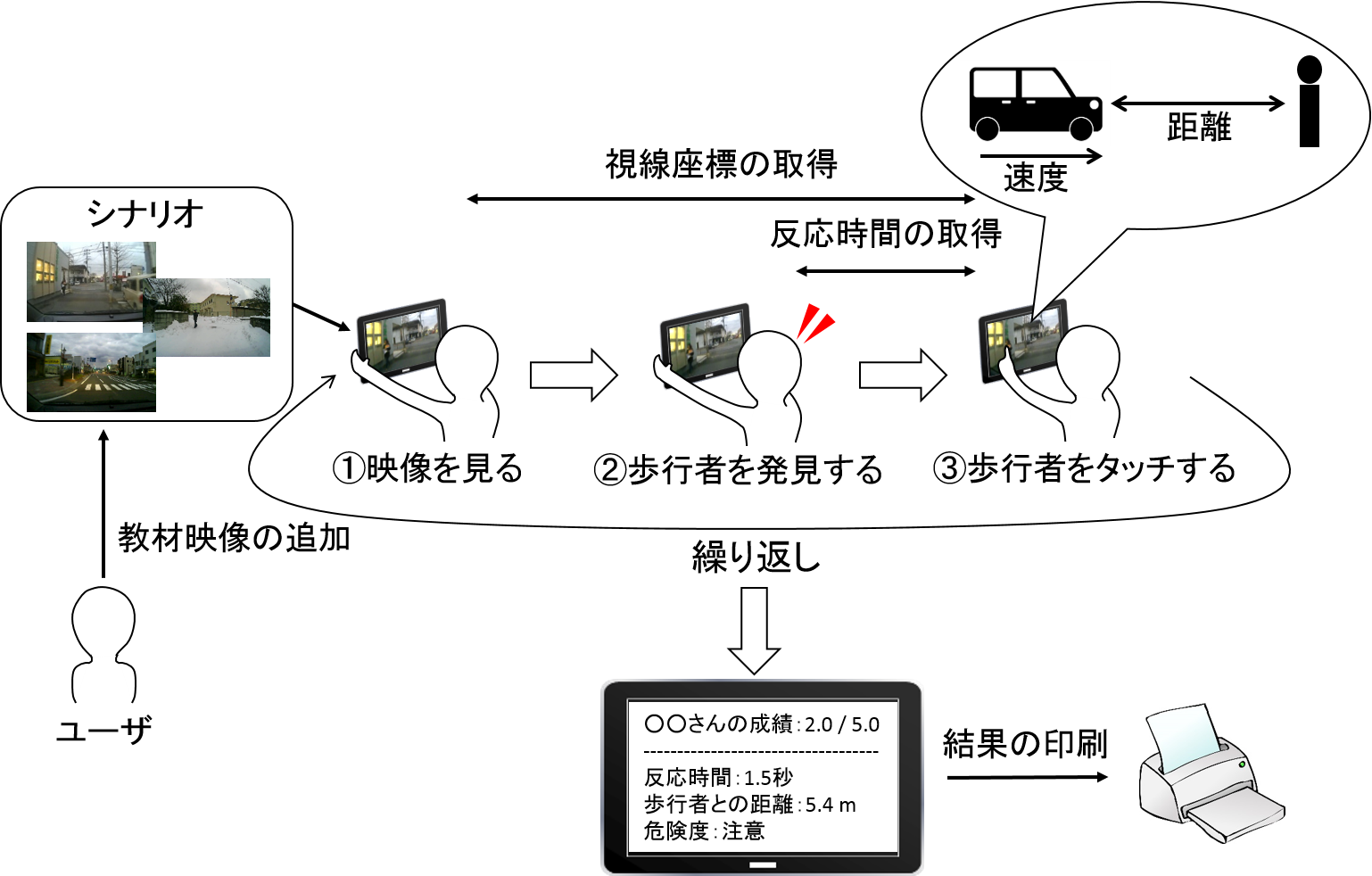
タッチパネル式モニタを搭載したPCで連続再生されるドライブレコーダ映像に対し,
歩行者と認知した際に画面上をタッチし,危険度を判定するシステムを開発している。
このシステムによる訓練を繰り返すことで,被験者の歩行者に対する認知能力を高める効果が期待できる。
映像中の歩行者を認識し,大きさや移動量を画像処理技術により計測することで,
歩行者出現からの反応時間,歩行者までの距離,車両速度を計測・解析する。
また,視線計測器を組み込むことで,被験者の注視行動を計測・分析することも可能としている。
360度カメラ映像を用いた運転者教育システム
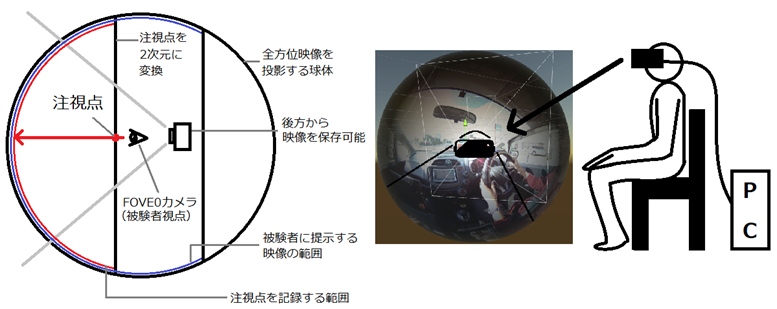
より実際の運転に近い情報提示を実現するために,
ドライバー視点の360度カメラ映像を視線計測機能付きのヘッドマウントディスプレイに提示し,
被験者の注視行動を計測・訓練するシステムを開発する。
歩行者と認知したことを被験者の視線情報から判定する仕組みや,
映像中の同一物体を判定する手法について検討する。
また,気象条件・交通状況・時間帯の異なる映像に対する注視行動の違いや,
同一走行環境に対する被験者間の注視行動の違いについて明らかにする。
訓練前後での実走行時の注視行動の変化も明らかにする。
運転時の注視物体の自動判定

深層学習などの機械学習による画像認識技術と視線計測技術を融合し,
ドライバーが何を注視したかを自動判定する手法を開発する。
また,頭部を固定している場合とは異なり,
運転時などの頭部運動がある場合の注視状態を判定する仕組みの実現を目指し,
画像認識を用いた注視状態の判定手法についても検討する。
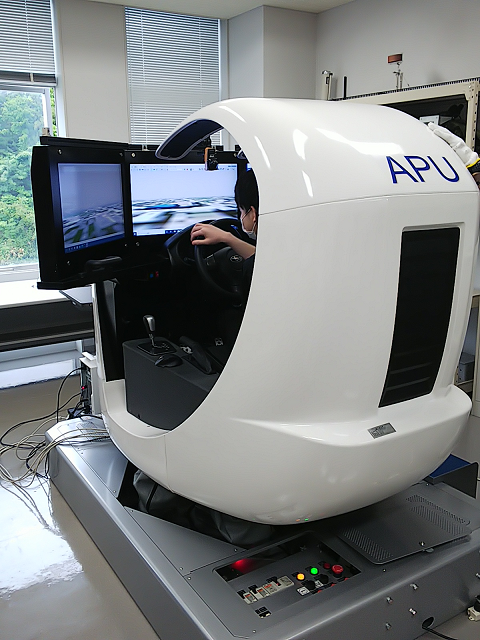
簡易ドライビングシミュレータの構築と注視行動分析

3Dモデリングツールを用いて視線計測可能なVRドライビングシミュレータを構築する。
構築したシステムにおいてドライバーの注視行動・運転行動を計測し,
様々な走行シーン・気象条件・時間帯における条件毎・被験者間の違いを明らかにする。
また,ドライブレコーダ映像・360カメラ映像を用いた運転者教育システムでの提示映像の走行シーンを再現し,
運転タスクの影響の有無とシステムの有効性について検証する。
深層学習を用いた安全な運転引き継ぎ
交通事故削減や渋滞緩和など、交通に関する問題解決手段として自動運転が注目されている。
レベル3では操作の主体がシステムとドライバーで切り替わるタイミングがある。
その際に発生する運転操作の引き継ぎに対し,
ドライバーが適切に運転できる状態でない場合,誤った操作による事故が発生する可能性が考えられる。
そこで,深層学習を用いた走行環境の把握、およびドライビングシミュレータを用いた実験を通じて,
引き継ぎ要求への対応可否の判定や,引き継ぎ要求発生時の注意箇所を特定する手法について検証し,
安全に運転操作を引き継げるシステムの実現を目指す。
映像中の物体認識と応用システム
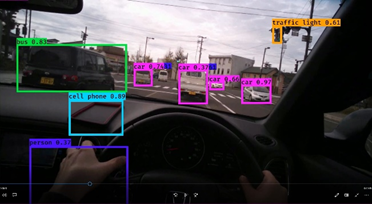
深層学習などの機械学習により,
ドライブレコーダ映像や運転者の視野映像などの映像中の物体(車・人・信号機・標識等)
を高精度に認識する手法について検討する。
また,画像認識・画像処理技術を応用した交通安全に寄与するシステム開発として,
ドライバーの注視行動・認知負荷の定量化,
生体センシング技術と融合することで運転シーンの危険度推定手法について検討する。